Vor ca. 20 Jahren wurde ich vom Virus befallen. Nein nicht der Modellbahnvirus, der war schon mit 5 Jahren. Corona war auch noch kein Thema.
Es war der Virus der langen Schiebebühne für ganze Züge, Der Virus brach in Weißkirchen bei der Rodgau Modellbahn Connection anläßlich einer Ausstellung mit FREMOdulen aus. Lt Vorankündigung sollte die Schiebebühne teilbar sein und ca. 2m lang sein. Genau weiß ich die Länge auch nicht mehr. Also die Hühner gesattelt und von Koblenz nach Weißkirchen geritten, Die Schiebebühne gab es, aber sie war nicht mehr teilbar, Das hatte irgendwie nicht funktioniert,
Damals wurde der Traum geboren irgendwann so einen Zugspeicher zu bauen. Über die Jahre habe ich geschaut, was andere bauen und was es für Materialien für die Führungen gab. Als Führungen wurden Schubladenteilauszüge aus dem Baumarkt verwendet und als Tisch nur eine billige nicht ausgesteifte Holzplatte. Die Ergebnisse konnte man in die Tonne treten. Mittlerweile gibt es natürlich sehr gute Teilauszüge von Firmen wie Hettich, aber ich war nicht übrzeugt, ob der Schiebetisch, wenn er ganz ausgezogen ist, nicht doch etwas runterhängt und die Gleise nicht mehr auf gleicher Höhe sind.
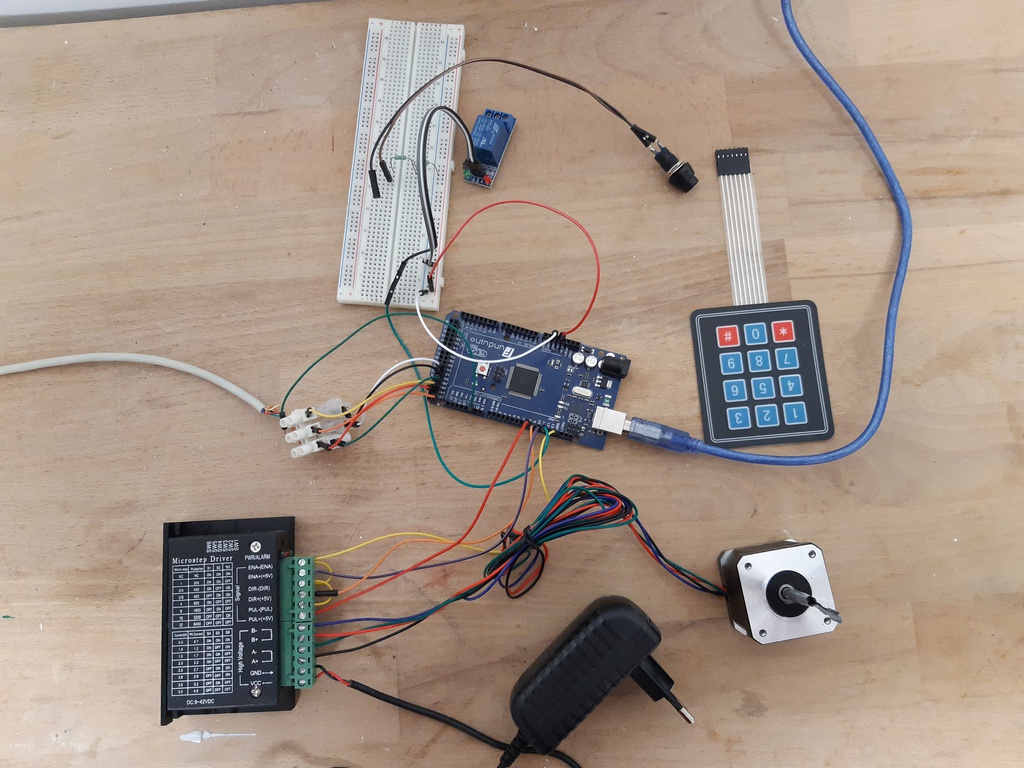
Aus China bekommt man (nein nicht nur Corona) jetzt sehr gute Linearführungen und Antriebe. Sicherlich nicht in IGUS Qualität, aber für diesen Zweck völlig ausreichend. Ich will ja keine Werkzeugmaschine mit hoher Lebensdauer bauen. Außerdem sind wir ja im Arduino Zeitalter angekommen. D.h mit der Hand den Tisch verschieben und mit einem Riegel aus Mamas Kleiderschrank fixieren muß auch nicht mehr sein. Es lebe der Schrittmotor driven by Arduino. Zu meinem 60. Geburtstag habe ich mir deshalb schon mal so ein Arduino Experimentier-Set schenken lassen. ![]() und habe mit C++ Programmierung auseinander gesetzt.
und habe mit C++ Programmierung auseinander gesetzt.
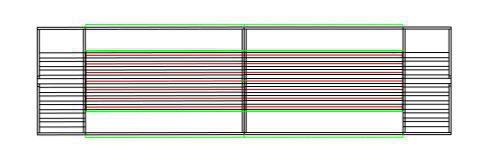
Angefang 2020 war es dann soweit nach ersten Papierskizzen, wurde im AutoCad weitergezeichnet. Geplant waren 2 identische zusammenschraubbare Schiebtische, von jeweils 1,20 Länge. 90 cm verschiebbar und 30 cm fest zum Abstellen von Loks. Auf dem 35 m breitem Schiebetisch sind 7 Gleise mit einem Mittenabstand von 50 mm vorgesehen. Den Abschluß bilden rechts und links 2 Aluwinkel 40x30, die als Absturzsicherung dienen und für die nötige Aussteifung des Tisches sorgen.
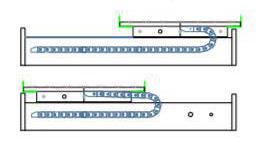
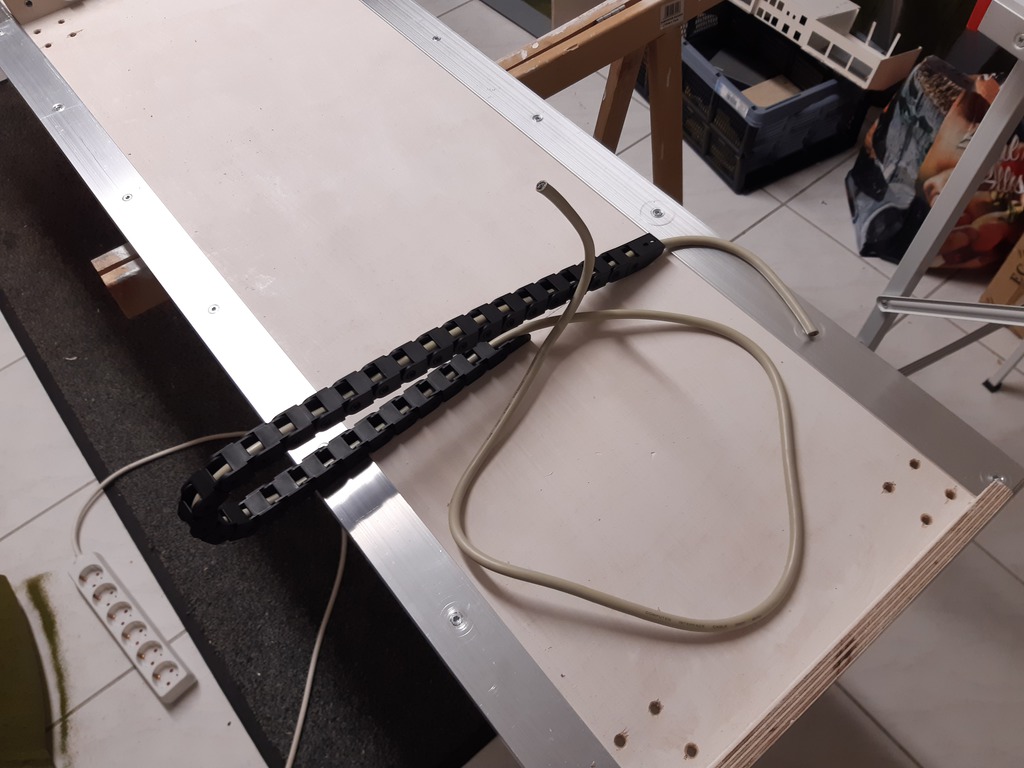
Über Energieketten werden Kabel zu den Gleisen geführt.
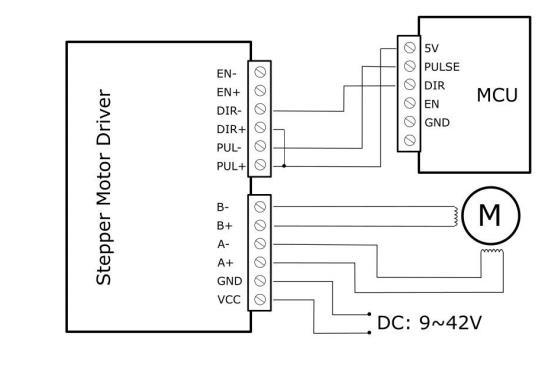
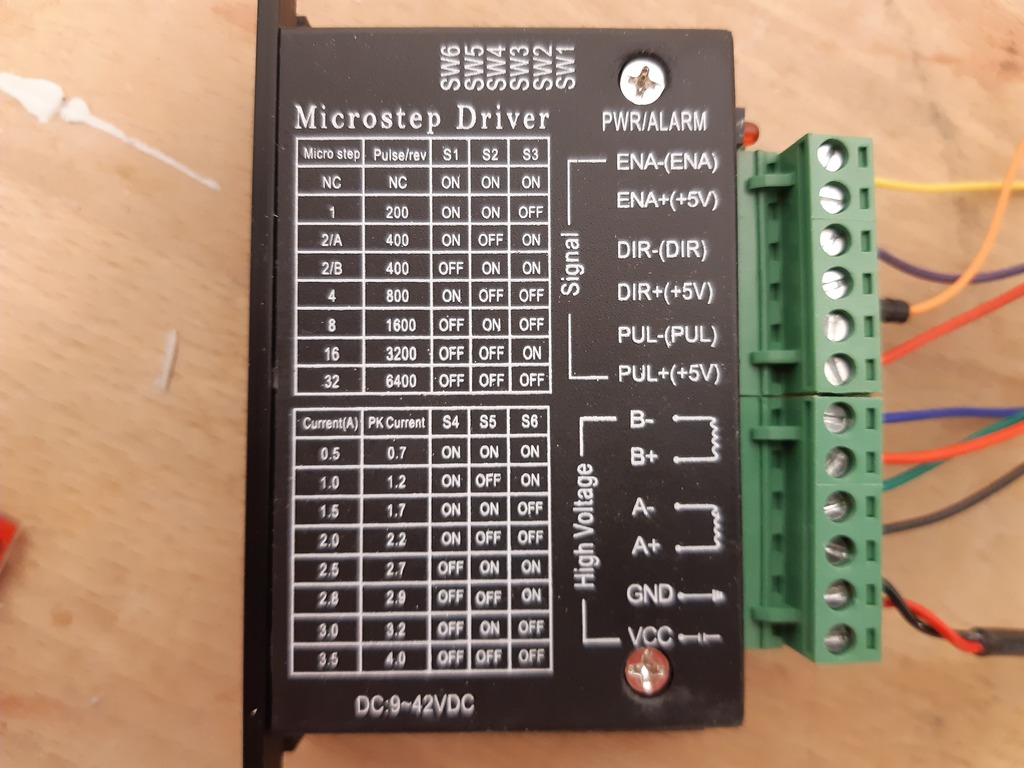
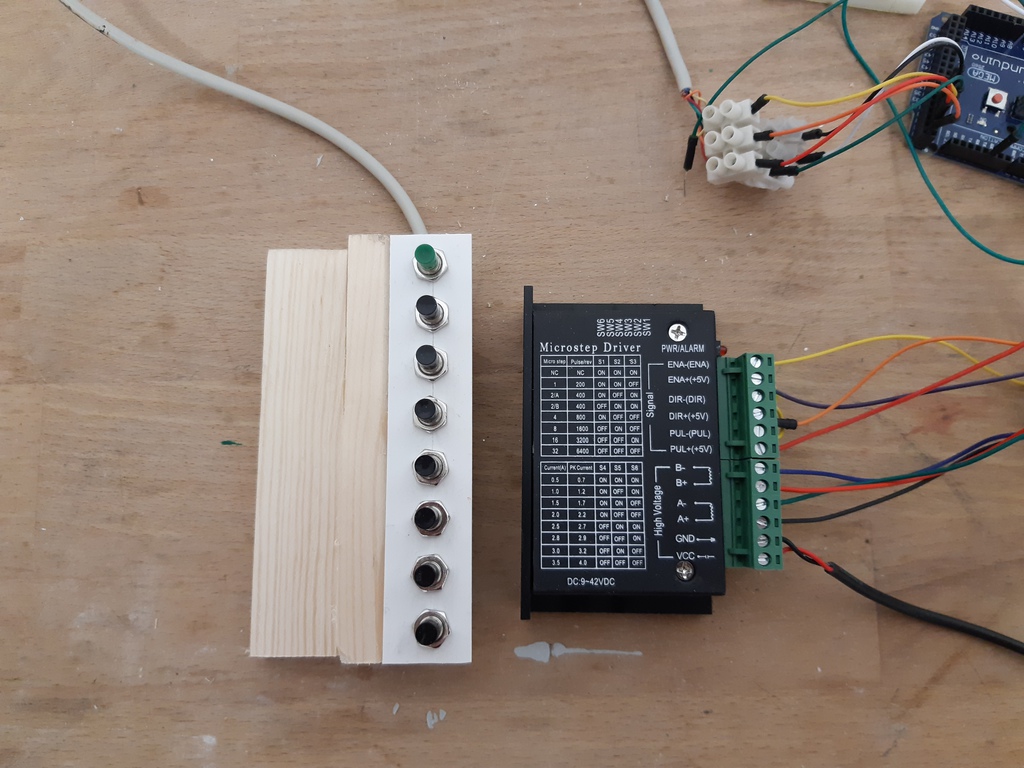
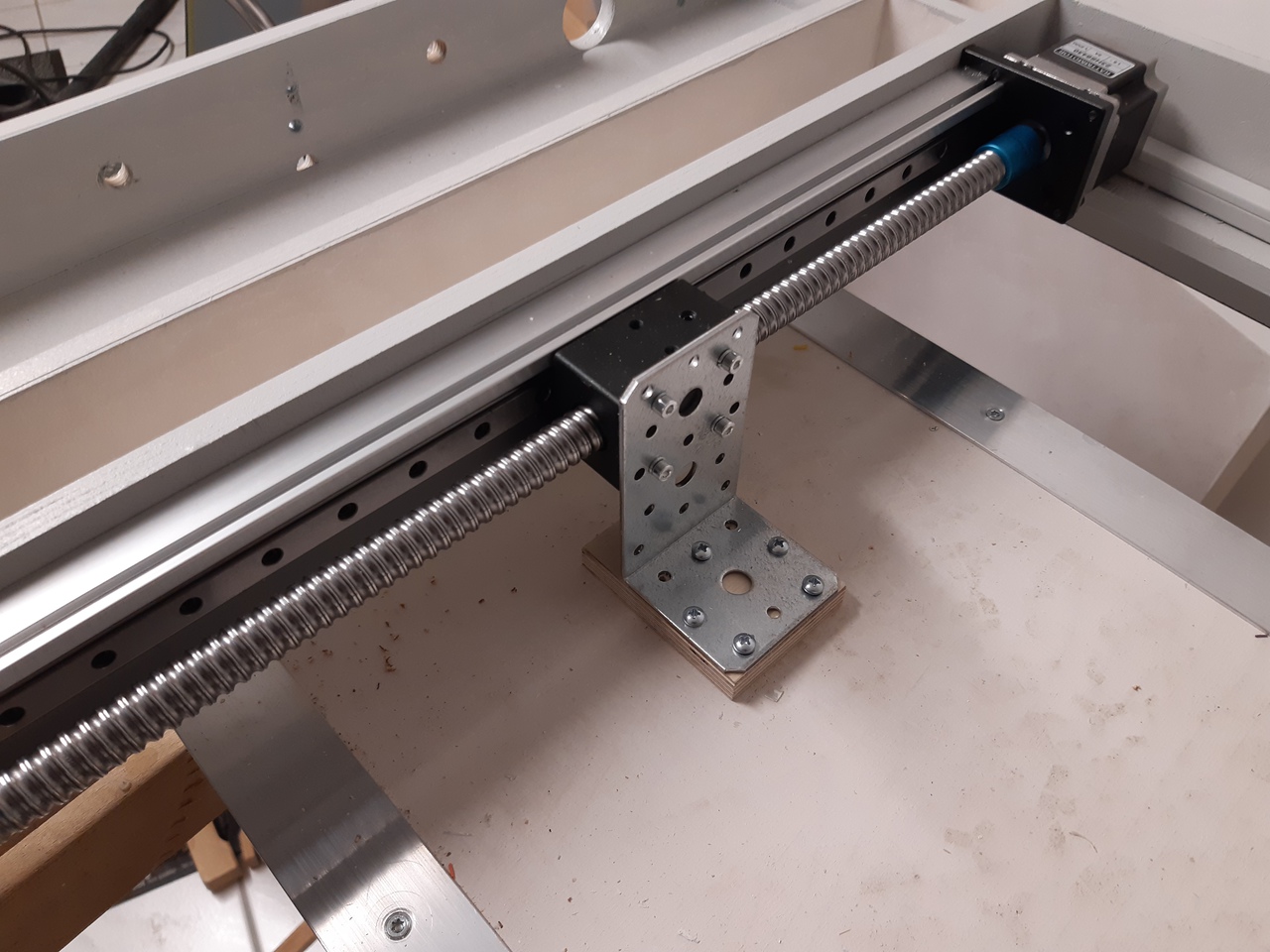
In jeder Einheit sollte so eine Antriebseinheit verbaut werden.

Anfang Februar hatte ich 2 davon in China bestellt, aber schon 10 Tage später wurde der Auftrag storniert.
Mitte März habe ich das Holz bei einem örtlichen Schreiner bestellt, weil Baumarkt Qualität mit Sägen, die nicht orthogonal sägen, nicht zielführend bei so einem Projekt ist.

An den 4 Außenecken wurde mit Holzdübeln gearbeitet um eine bessere Passgenauigkeit zu bekommen,

Das waren neben etlichen Zwingen die wichtigsten Werkzeuge.


Glücklicherweise hatte ich die Linearfühungen vor dem Holz gekauft. Angegeben waren sie mit einer Länge von 600 mm. Gekommen sind sie mit 601,5 mm. Also wurden alle Querspannten mit 602 mm bestellt.

Um eine bessere Torsionssteifigkeit zu erhalten wurden alle Spannten als T- oder U-Profil ausgebildet und mit 6 mm Holzdübeln von außen mit einander verbunden-
Pro Segment habe ich ca. 40 Holzdübel zu 3/4 eingeschlagen und den Rest später abgeschliffen. Schrauben habe ich fast gar nicht verwendet.

Mit dem Zimmermannwinkel habe ich erst die Löcher für die Linearführungen angezeichnet und dann mit dem Profidübler gebohrt.


Fixierung der Aluprofile und Vormontage der beiden Energieketten
Jetzt wurden die beiden zusammengeschraubten Tische mit den Linearführungen verschraubt und dann das ganze ausgerichtet, bis das Hin- und Her-Schieben einwandfrei funktionierte. Erst dann wurden die Füße der Führungen festgeschraubt.
Es fehlt nur noch der Linearantrieb, der ist aber erstmal dank Kurzarbeit einer Haushaltsperre zum Opfer gefallen. Ich werde aber nur einen Antrieb verbauen, so dass es ein Master- und ein Slave-Modul gibt. Das Master-Modul soll natürlich auch allein im Arbeitszimmer etc. verwendet werden.




FREMO Lochbild darf natürlich nicht fehlen.


So spät genug für heute. Die Schreibfehler werden morgen ausgebessert. ![]()
Martin